
記事担当:共立エレショップ
[ハンダ付け不要-非マイコン系]
先週は、ずっと作ってみたかったロボットキット「フォロ」の身体と頭を作りました。(「電工女子★6足歩行ロボ「フォロ」を作ります!★Part1」)


今週はその続きに取り掛かろうと思います。
先週も紹介しましたが、工作するうえで必要な工具はコレ!
(1)ニッパー
(2)ドライバー(サイズ:No.1)
(3)単4乾電池×4本
部品の切り離しにニッパーが、組立にはドライバーが、フォロを動かすのに単4乾電池が必要になるんでしたね。
そして、オカポンが作ってみてあったら便利だな、と思ったのがピンセットでした。

さて、では前回の続きです。
身体まで作ったら、ひっくり返して下半身を組み立てていきます。

まずは、下半身のベースになる腰部分を取付けます。
▼マークを合わせたり、部品の方向を確認したり。
間違いやすいので説明書をよく確認しながら各パーツをはめ込んでいきます。


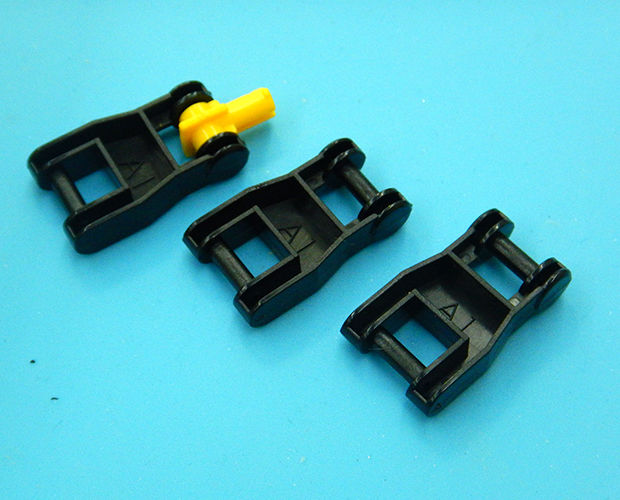
そして、重要な足部分を作っていきます。
まずは腰パーツに3本分。人間で言うと太もも部分ですね。



次に別パーツで3本分。
作り終わったら腰パーツと合体!



先ほど取り付けた別パーツ(一番上に見える黄色いパーツ)の足3本に部品を追加します。


お腹の底をねじで固定します。
このねじをしめる順番ですが、きっちり説明書に書かれているので、迷うことがありません。
説明書通りに作れば失敗しないので安心です。



まだまだ足です。人間でいうところのふくらはぎから足先にかけてですね。


これを、先に作ったふともも部分にパチンパチンとはめていきます。



組立てている最中は、何がどうなっているのかよく分かりませんが、出来上がると「うわ~、こんな風になっているんだ~…!!!」と驚きます。
思ってた以上に複雑な構造で、正直何がどう動くのか全く分かりません。

わー!!!立った!!!!!フォロが立った!!!!(^^)
理屈はわからなくてもフォロの可愛さなら判ります。
ここまでできれば完成も目前です。
あとは、腕を作って…



取り付けると、完成です!!!!!

ひゃぁぁ!!!
かわゆい!!!!!
持ち方ですが、腕や足を持つと部品がはずれて落ちちゃうので、頭を持つように、とのこと。
…持ってみた。


あぁぁぁ・・・かわいい・・・!!!
おでこにあるボタン一つで電源のON・OFF、モード切り替えとすべての操作ができるようになってます。
おでこボタンを2秒ほど押し続けると、目が光ってブザーが鳴って、足がバタバタうごきます。
これがまた可愛いのなんの…。
この動作がフォロが目覚めた合図です。

あ、因みに。
電池(単4×4本)は新品のものを使いましょうね。
オカポン、まぁテストだし良いかなぁ…と思って、机の上に転がってた電池使ったんです。
電源ONにした時は目も光って音も鳴って動いてくれたんですが、モード切り替えてもうんともすんとも言わないんです。
あれ?ってなって、電源ON・OFF繰り返したんですが、目は光るけど動かない。
もしや…と思って電池の残量をチェッカーで測ったら、4本中2本の残量がほぼ無い状態でした…。
新品電池に変更したところ、とっても元気に動き回ってくれましたよ。
みなさんも電池の残量には気をつけてくださいね!!
さて、では実際に動くところを見ていただきましょう~!
ただ歩かせるだけでカワイイフォロなのですが、実はオカポン、やってみたいことがありまして。
それはなにかというと...
まずはフォロをもう一台用意します。
そう、フォロ2台で「フォロの行進」をやってみたいと思います!!
ちんまいフォロが縦に並んで歩く姿、めっちゃカワイイです!!
(記事:オカポン)
更新予定:毎週木曜日(次回は5月17日です!)
※個数を記入していますが、リンク先ページ内で変更可能です。
[ハンダ付け不要-非マイコン系]
先週は、ずっと作ってみたかったロボットキット「フォロ」の身体と頭を作りました。(「電工女子★6足歩行ロボ「フォロ」を作ります!★Part1」)


今週はその続きに取り掛かろうと思います。
先週も紹介しましたが、工作するうえで必要な工具はコレ!
(1)ニッパー
(2)ドライバー(サイズ:No.1)
(3)単4乾電池×4本
部品の切り離しにニッパーが、組立にはドライバーが、フォロを動かすのに単4乾電池が必要になるんでしたね。
そして、オカポンが作ってみてあったら便利だな、と思ったのがピンセットでした。

さて、では前回の続きです。
身体まで作ったら、ひっくり返して下半身を組み立てていきます。

まずは、下半身のベースになる腰部分を取付けます。
▼マークを合わせたり、部品の方向を確認したり。
間違いやすいので説明書をよく確認しながら各パーツをはめ込んでいきます。


そして、重要な足部分を作っていきます。
まずは腰パーツに3本分。人間で言うと太もも部分ですね。


次に別パーツで3本分。
作り終わったら腰パーツと合体!



先ほど取り付けた別パーツ(一番上に見える黄色いパーツ)の足3本に部品を追加します。


お腹の底をねじで固定します。
このねじをしめる順番ですが、きっちり説明書に書かれているので、迷うことがありません。
説明書通りに作れば失敗しないので安心です。



まだまだ足です。人間でいうところのふくらはぎから足先にかけてですね。


これを、先に作ったふともも部分にパチンパチンとはめていきます。



組立てている最中は、何がどうなっているのかよく分かりませんが、出来上がると「うわ~、こんな風になっているんだ~…!!!」と驚きます。
思ってた以上に複雑な構造で、正直何がどう動くのか全く分かりません。

わー!!!立った!!!!!フォロが立った!!!!(^^)
理屈はわからなくてもフォロの可愛さなら判ります。
ここまでできれば完成も目前です。
あとは、腕を作って…



取り付けると、完成です!!!!!

ひゃぁぁ!!!
かわゆい!!!!!
持ち方ですが、腕や足を持つと部品がはずれて落ちちゃうので、頭を持つように、とのこと。
…持ってみた。


あぁぁぁ・・・かわいい・・・!!!
おでこにあるボタン一つで電源のON・OFF、モード切り替えとすべての操作ができるようになってます。
おでこボタンを2秒ほど押し続けると、目が光ってブザーが鳴って、足がバタバタうごきます。
これがまた可愛いのなんの…。
この動作がフォロが目覚めた合図です。

あ、因みに。
電池(単4×4本)は新品のものを使いましょうね。
オカポン、まぁテストだし良いかなぁ…と思って、机の上に転がってた電池使ったんです。
電源ONにした時は目も光って音も鳴って動いてくれたんですが、モード切り替えてもうんともすんとも言わないんです。
あれ?ってなって、電源ON・OFF繰り返したんですが、目は光るけど動かない。
もしや…と思って電池の残量をチェッカーで測ったら、4本中2本の残量がほぼ無い状態でした…。
新品電池に変更したところ、とっても元気に動き回ってくれましたよ。
みなさんも電池の残量には気をつけてくださいね!!
さて、では実際に動くところを見ていただきましょう~!
ただ歩かせるだけでカワイイフォロなのですが、実はオカポン、やってみたいことがありまして。
それはなにかというと...
まずはフォロをもう一台用意します。
そう、フォロ2台で「フォロの行進」をやってみたいと思います!!
ちんまいフォロが縦に並んで歩く姿、めっちゃカワイイです!!
作ったフォロ(後ろ着いて歩く子)が少し歩いた後、前を歩いているフォロを見失ってオロオロしています。こういう仕様なのでしょうか…?
後ろを歩く子がキョロキョロするから、前の子を見失う(センサーから外れる)んですね。
もう!オバカちゃん!(デレデレ)ってなりながら、撮影してました。
※注意※
フォロなんですが、目の下部分に赤外線センサーがあります。

なので、この位置よりも低い障害物だと気づかずにずんずん進んでしまうんですね。
障害物を配置する時は、ちょっと高めにするのが良いですよ!
ぜひ、可愛いフォロを作ってみてくださいね!フォロなんですが、目の下部分に赤外線センサーがあります。

なので、この位置よりも低い障害物だと気づかずにずんずん進んでしまうんですね。
障害物を配置する時は、ちょっと高めにするのが良いですよ!
(記事:オカポン)
更新予定:毎週木曜日(次回は5月17日です!)
★記事内で紹介した商品は、こちらから購入できます!★
商品 |
型番 |
個数 |
一括注文 リンク先 |
| 赤外線レーダー搭載!6足歩行ロボ フォロ | MR-9107 | 1個 | こちらから→ |
| モデラーズニッパー α(グレイ)/クラフトツールシリーズ No.93 | ITEM74093 | 1個 | |
| 先端滑り止め加工付プラスドライバー#1(六角軸タイプ) | EA560WD-1 | 1個 | |
| 単4形アルカリ電池4本パック | LR03R/4S | 1個 | |
| 汎用型ピンセット 120mm[RoHS] | P-880 | 1個 | |
| 工作マット / 350×250mm | KP-S130 | 1個 |

